
George Council
Ph.D in Electrical and Electronics Engineering (2019)Postdoctoral researcher at the Carnegie Mellon University
Education
B.S. in Electrical Engineering 2012 - Montana State University, Bozeman.
M.S. in Electrical Engineering: Systems 2013 - University of Michigan, Ann Arbor.
Ph.D. Electrical Engineering 2019, University Of Michigan.
George Council orginally entered the University of Michigan as a terminal Master's student, but was sufficiently enticed by honeyed promises of low pay, long hours, and interesting problems to enroll in the doctoral program during the winter of 2013. With an undergraduate degree from Montana State University in electrical engineering, he'll occasionally lay claim to that title, but has interests ranging from abstract math to field ecology. His primary responsibilities include breaking things and asking questions.
Research Interests
His research direction is focused on the genesis, description, and instantiation of dynamical behaviors that are robust to uncertainty; specifically, in robotic legged locomotion. Robots are faced with with unanticipated challenges in their environment (rough ground, obstacles, etc) as well as morphological variation (imprecision in construction, damage during operation). Creating and demonstrating locomotion strategies or design principles to overcome these realities is an important component of deploying practical walking robots that operate autonomously (or at least, remotely) in the field. Existing techniques developed by acting roboticists tend to rely on sensing knowledge and feedback to measure and respond to changes in the robots performance. By representing the robot as a dynamical system (an ordinary differential equation), George hopes to create abstract design principles that allow legged robots to mitigate environmental and structural variation without relying on complex sensing or feedback, but instead have ‘baked-in’ performance guarantees.
George tries to live an intersection of mathematics and hardware; by bridging the gap between theorectical tools and concrete applications, he hopes to reduce the turn-around time of theory to practice.
Feedforward Deadbeat Stabilization
This work develops a recipe to encode dynamical outcomes of controlled systems into feedforward behaviors. In control, feedback is the typically tool to stabilize a system versus extraneous perturbations and disturbances. It is shown that certain disturbances can be feedforward stabilized WITHOUT feedback; it has application in the design of a robotic leg that does not need complex sensing information to reject uncertain contact with the ground.
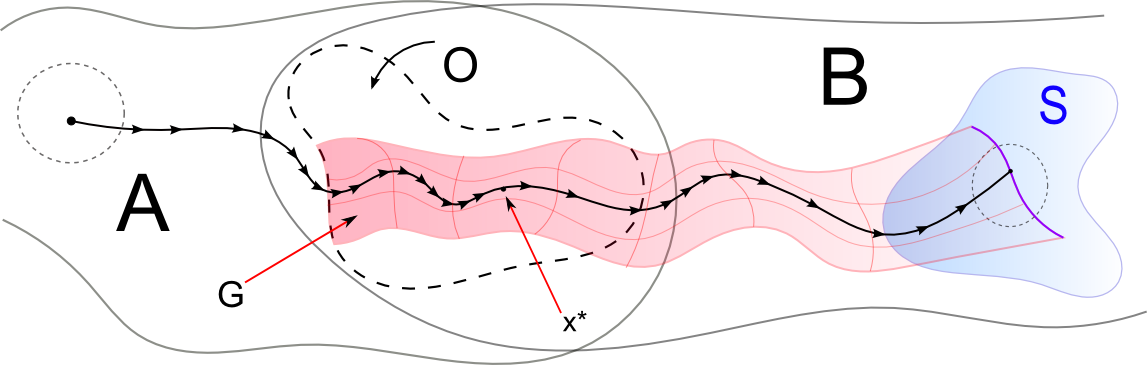
The result is a generalization of an idea explored previously in the literature - that a Spring Loaded Inverted Pendulum (SLIP), a popular model for legged locomotion could reject uncertainty in ground height using a feedfoward controller. While others had solved this in the specific case of the conservative SLIP, the result presented generalizes to a much broader range of hybrid dynamical systems, of which the SLIP is a member of. The picture below illustrates the idea - there are two regions, A, and B. By restriction the flow in A to a specified submanifold of the state space, uncertainty in the region O can be totally rejected. For SLIP, A would correspond to the descent-aerial phase, while B would be an aggregate of stance-ascent dynamics.
Gait Recovery Through Energy Matching
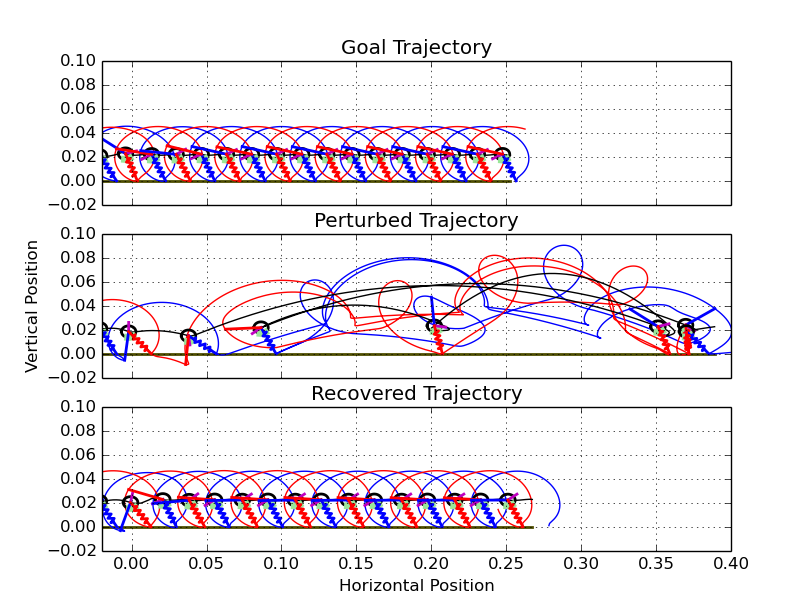
A problem that is very plausible and not well-addressed is deployed robots suffering intractable damage (lost a limb, damaged body, etc) but are still intuitively functional to a human observer. If the robot can’t be repaired immediately (in the field, it’s on Mars, etc), we argue that an approximate recovery of a gait (e.g, the robot can learn to limp) can be done extremely quickly and reliably without the needed for complex computation by using a notion of equivalence between the ‘normal gait’ in used before damage, and what the robot is capable of generating post-damage. Surprisingly, this is not a well-studied principle in robots - many have used very elaborate simulations to generate optimal behaviors, but haven’t well-addresed their persistence when the robot morphology changes. Again, motivated by biology for two reasons, 1) organisms change over time, and their capabilities vary, yet are able to smoothly adapt without significant issue for most of their life cycle, and 2) large mammals can learn to limp in a matter of seconds when subject to light limb damage. While their exact trajectory is NOT preserved, they’re ambulatory.
Rhex WITHOUT a Buehler Clock
A larger-scale project that ranges from foundational theory to experimental validation using event-selected vector fields to synthesize a alternating tripod gait for a RHex-type robot without using reference trajectory tracking. A more detailed description is here