August 15, 2014 / by unknown / In news
DeadBeat Control
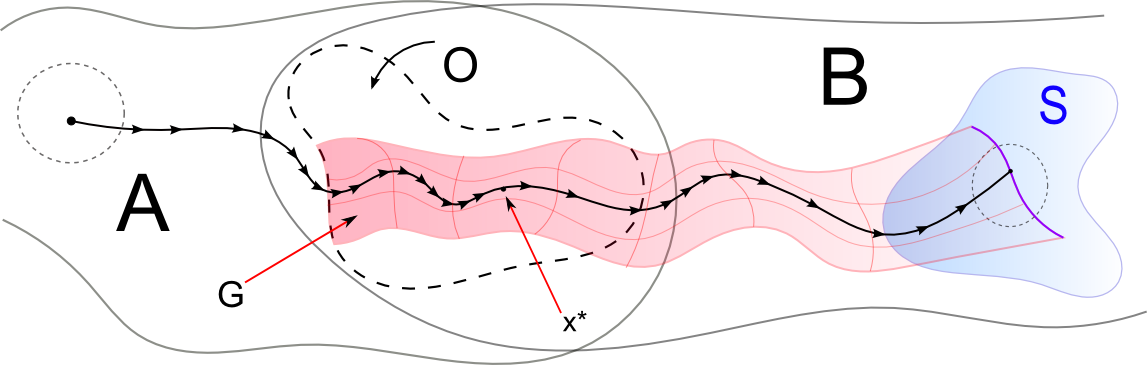
In August of 2014, we had the opportunity to present an interesting result at the International Conference on Advanced Mechatronic Systems, held in Kumamoto, Japan. The result being presented was a generalization of an idea explored previously in the literature - that a Spring Loaded Inverted Pendulum (SLIP), a popular model for legged locomotion could reject uncertainity in ground height using a feedfoward controller. While others had solved this in the specific case of the conservative SLIP, the result presented generalizes to a much broader range of hybrid dynamical systems, of which the SLIP is a member of. The picture below illustrates the idea - there are two regions, A, and B. By restriction the flow in A to a specified submanifold of the state space, uncertanity in the region O can be totally rejected. For SLIP, A would correspond to the descent-aerial phase, while B would be an aggregate of stance-ascent dynamics.
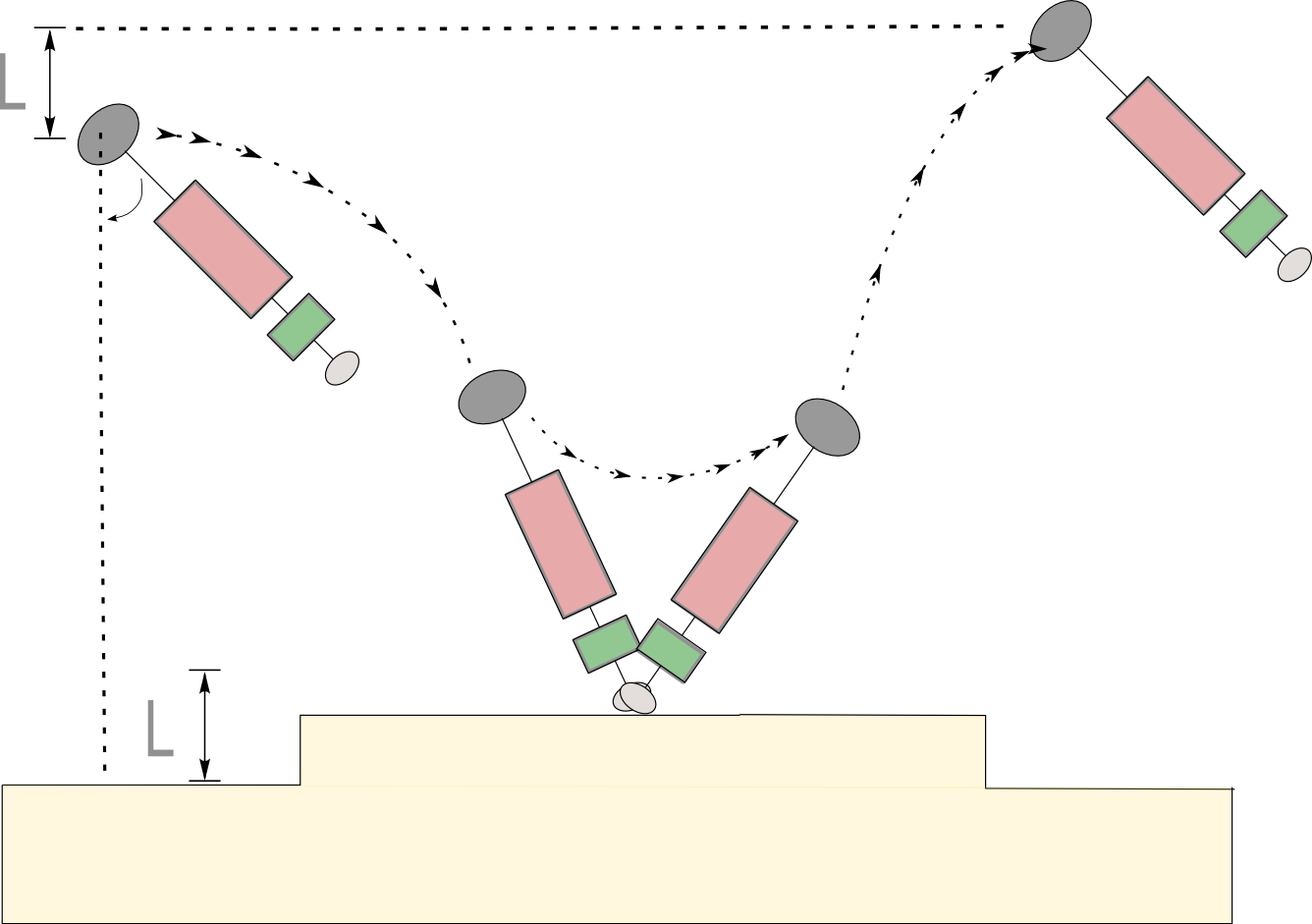
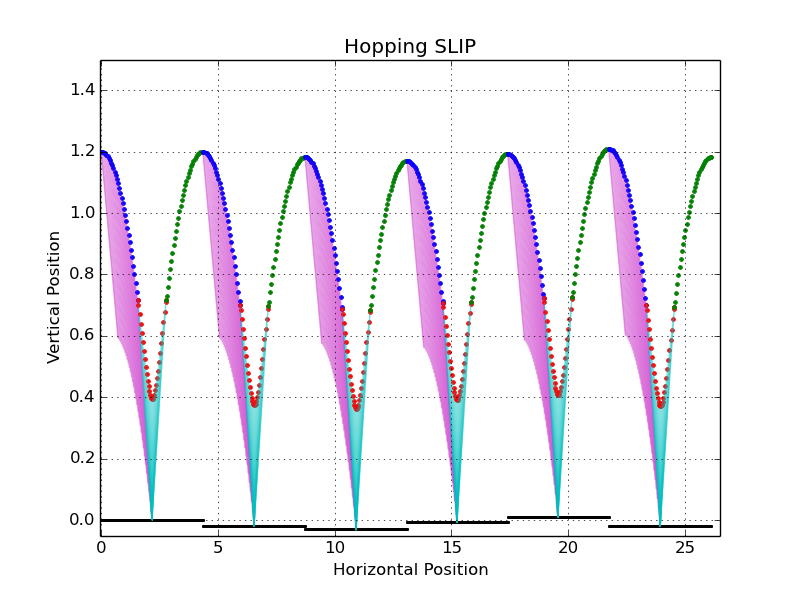
The result essentially presents a reciepe for the construction of a controller to achieve stipulated performance tasks that are subject to uncertainity in transition, reducing a potentially very complex problem to a much simplier one. Shown below are a respresentation of SLIP for clarity, and a simulation output for this method being applied to a non-conservative SLIP, allowing it to maintiain a periodic solution that fixes a relative height above the ground.